Tesseract
Discussion in '3D printers' started by JCPhlux, Oct 22, 2015.
Tesseract
Discussion in '3D printers' started by JCPhlux, Oct 22, 2015.
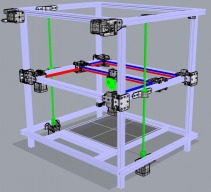
Large Core XY 3d Printer W/fixed build plate
Discussion in '3D printers' started by JCPhlux, Oct 22, 2015.
Discussion in '3D printers' started by JCPhlux, Oct 22, 2015.
Large Core XY 3d Printer W/fixed build plate