FARM OX (Four Axis Rotary Machine)
Discussion in 'CNC Lathes' started by ymilord, Jul 29, 2015.
FARM OX (Four Axis Rotary Machine)
Discussion in 'CNC Lathes' started by ymilord, Jul 29, 2015.
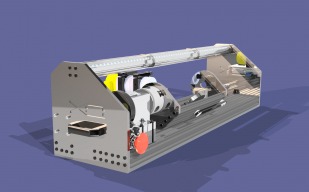
Four Axis Rotary Machine (FARM) OX. Equipped with a X,Z,A & C Axis.
Page 1 of 2
Page 1 of 2