DoubleX
Discussion in '3D printers' started by greg97233, Sep 17, 2014.
DoubleX
Discussion in '3D printers' started by greg97233, Sep 17, 2014.
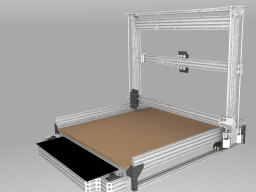
This is a Dual X-axis platform.
Discussion in '3D printers' started by greg97233, Sep 17, 2014.
Discussion in '3D printers' started by greg97233, Sep 17, 2014.
This is a Dual X-axis platform.