
Hi all,
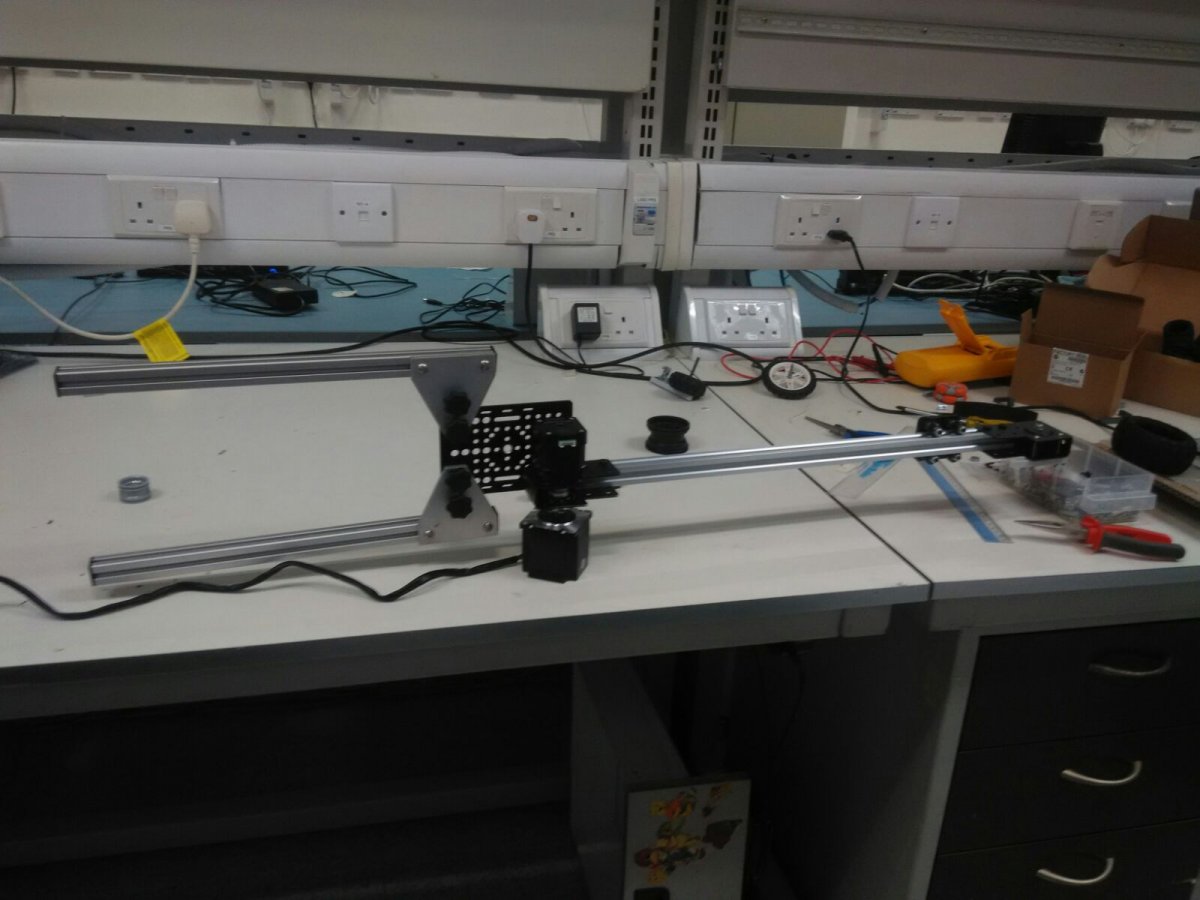
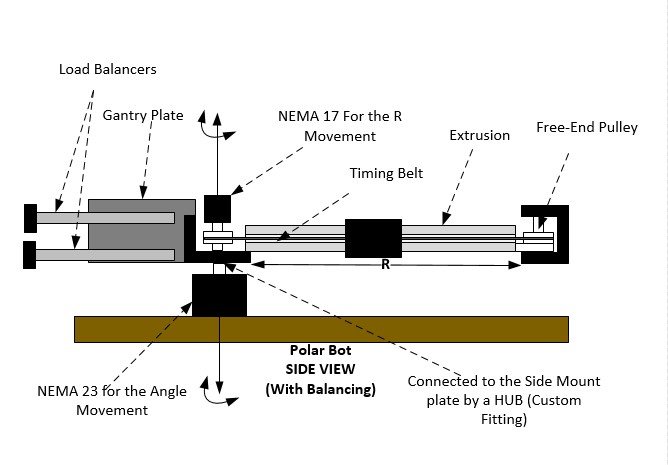
We have created a polar bot using the Open Builds linear motion Bundle pack. We purchased an extra NEMA 23 motor and a gantry plate (for the load balancer). The NEMA 23 motor was used to control the Phi movement. The R movement is controlled by the NEMA 17 which came along with the Open Builds Linear Motion Bundle Pack.

Polar Bot
Build in 'Polar Bots' published by Arunkumar, Dec 15, 2015.
Polar Bot which used to depress buttons
-
-
Build Author Arunkumar, Find all builds by Arunkumar
-
- Loading...
-
Build Details
- Build License:
-
- CC - Attribution NonCommercial - No Derivs - CC BY NC ND
Reason for this Build
This is for the one of the projects where we will mount an actuator on the Roller Plate which will in turn used to depress some buttons