I started this build knowing nothing about CNC or OpenBuilds. I had previously built a Rigidbot 3D printer and now wanted to complement it with a subtractive manufacturing machine.
After a lot of research I settled on building an Ox CNC 1000 mm x 750 mm machine using the SWM3D kit. I already had my own Smoothieboard that I would use for the controller but realized I had to add external motor drivers due to the 2A limitation of the Smoothieboard output; it wouldn't be enough to power the stepper motors.
This build is using a 400W spindle (also part of the kit).
I wanted to keep the OX separate from the electronics (as opposed to mounting on the gantry) so I 3D printed some cable chains for both the X and Y axes and ran all wires down the side and out the back of the OX. I also put in wire connectors at each end of the cable chains to aid in troubleshooting, routing, and future expansion. Basically, I wanted this to be somewhat modular.
For the build area, Mark Carew's raised build area on the OX page looked like a simple, practical implementation. I am at that point in the build as I decided to write this.
Due to anticipated noise and mess, I am going to build a Vslot enclosure with removable acrylic walls and top. Let's see how it goes.
I didn't take pictures of every little thing I built so if you want to see something specific just ask in the comments.
=====
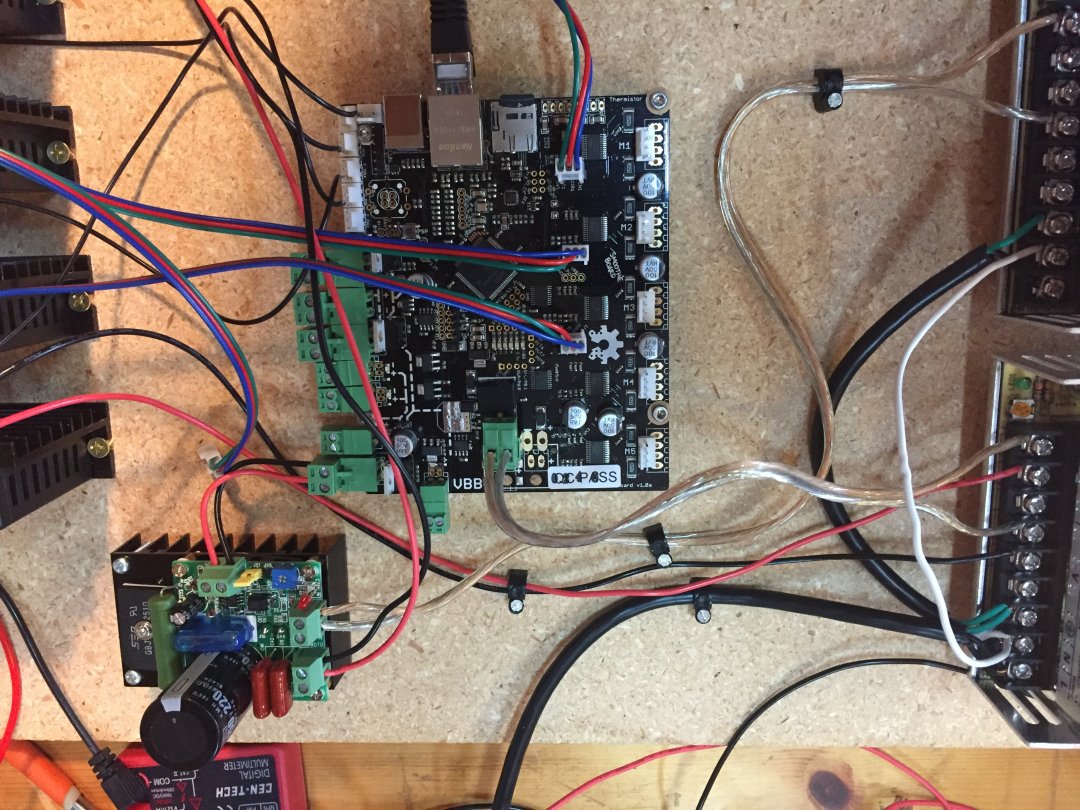
The wired Smoothieboard. You will notice that I'm using the Alpha (X), Beta (Y), and Gamma (Z) channels only. This is set up as "open drain" which you can read about at smoothieware.org. The 4 black boxes on the left are the external motor controllers. I decided to use these since the drivers in this version of the Smoothieboard max out at 2A. My Z motor only needs 1.68A but the X and Y steppers require about 2.8A.
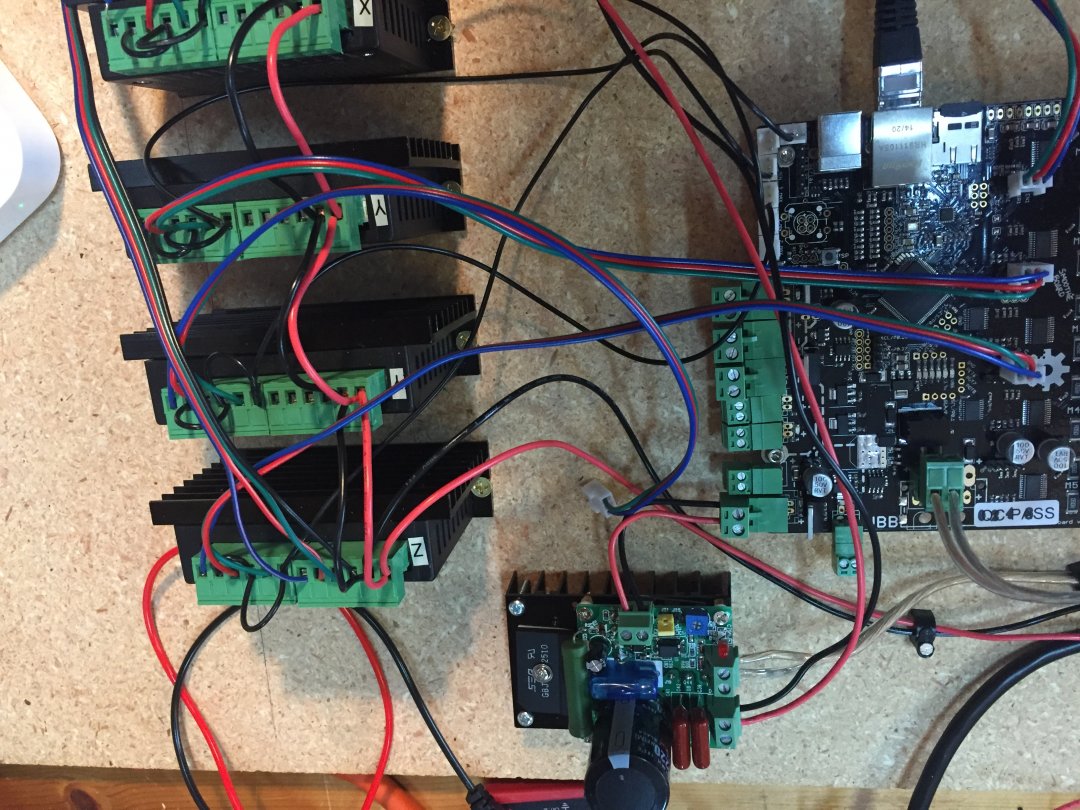
Another view of the electronics setup. Since I am using the Beta channel for both Y stepper motors, I went ahead and jumpered the 2 Y external motor controllers to each other for the Step, Dir, and Enable + pins.
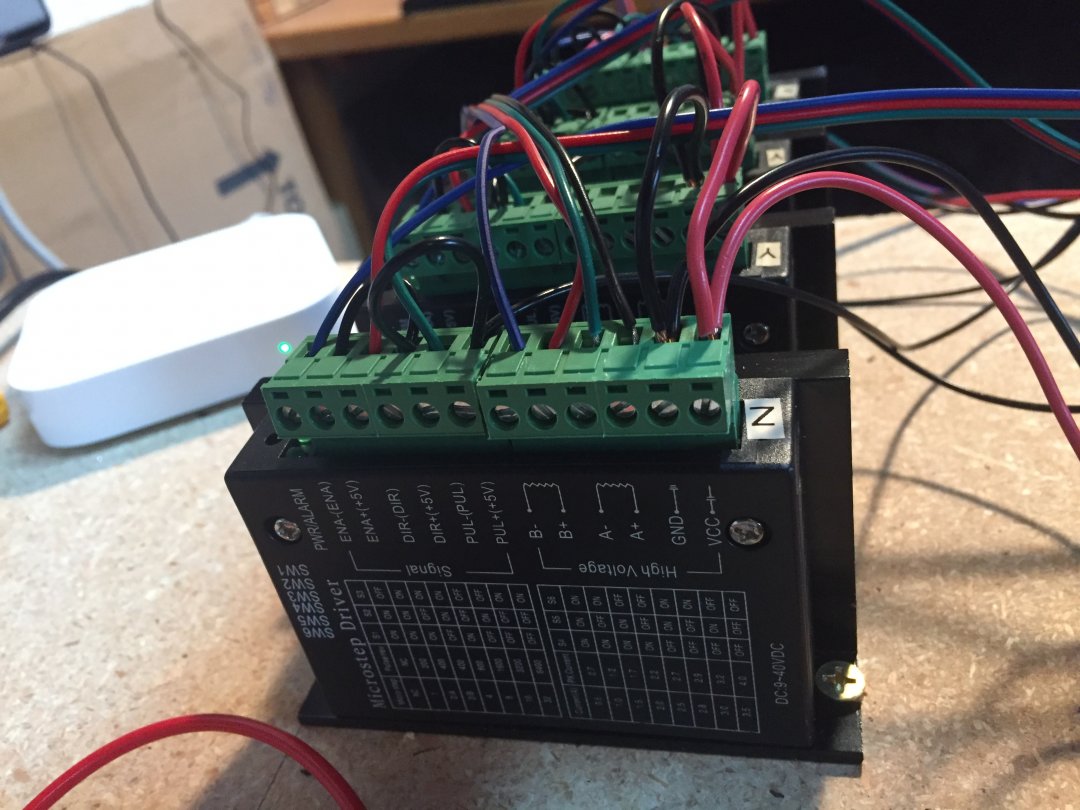
A close up view of the Z motor controller wiring.
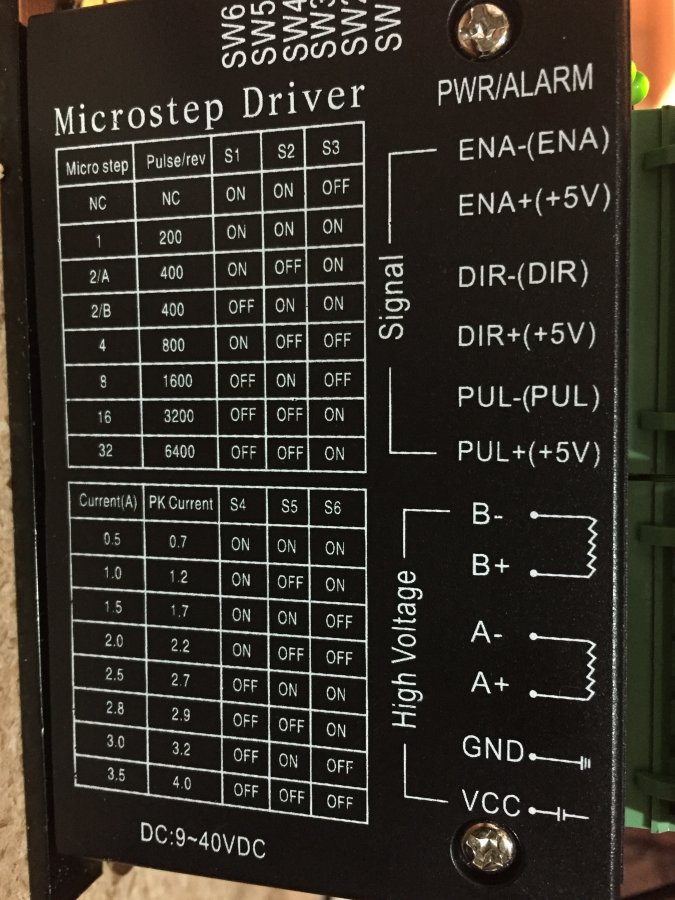
Here are the dip switches on each motor controller. I ran into a problem with setting the steps and wish I would have found somebody else with this problem before spending all of the time on it. Since the Smoothieboard already puts out 32 microsteps as a baseline, I had to set the microsteps on the motor controller to 1 microstep in order to get the output to work correctly.
Since this was going in my garage I wanted to make sure it was quiet and dust free. The solution I came up with was to use V-slot for an external frame, with 2 solid walls and top containing acoustic foam, 2 plexiglas walls, and a solid raised base mounted on acoustic feet. The result is better than expected. The sound is lower than a conversation.
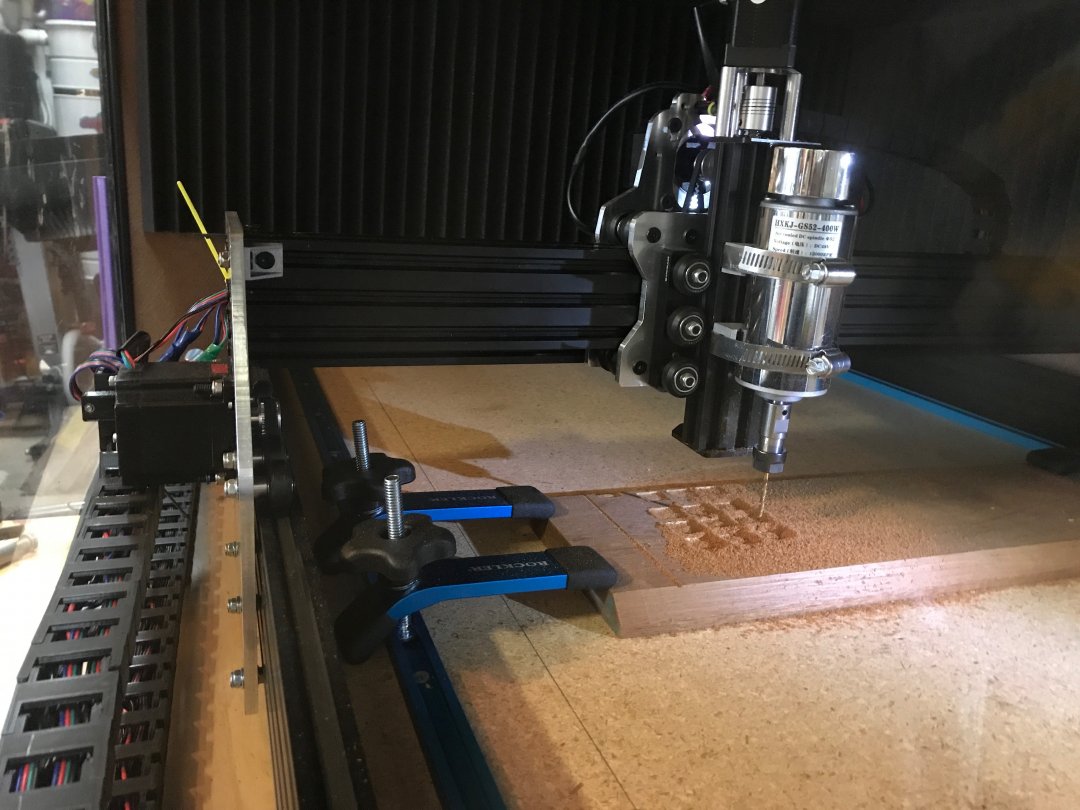
In this picture you can also see the blue universal track and holddown clamps I added on after I couldn't figure out how to hold my raw stock in place. These tracks were extremely easy to install.
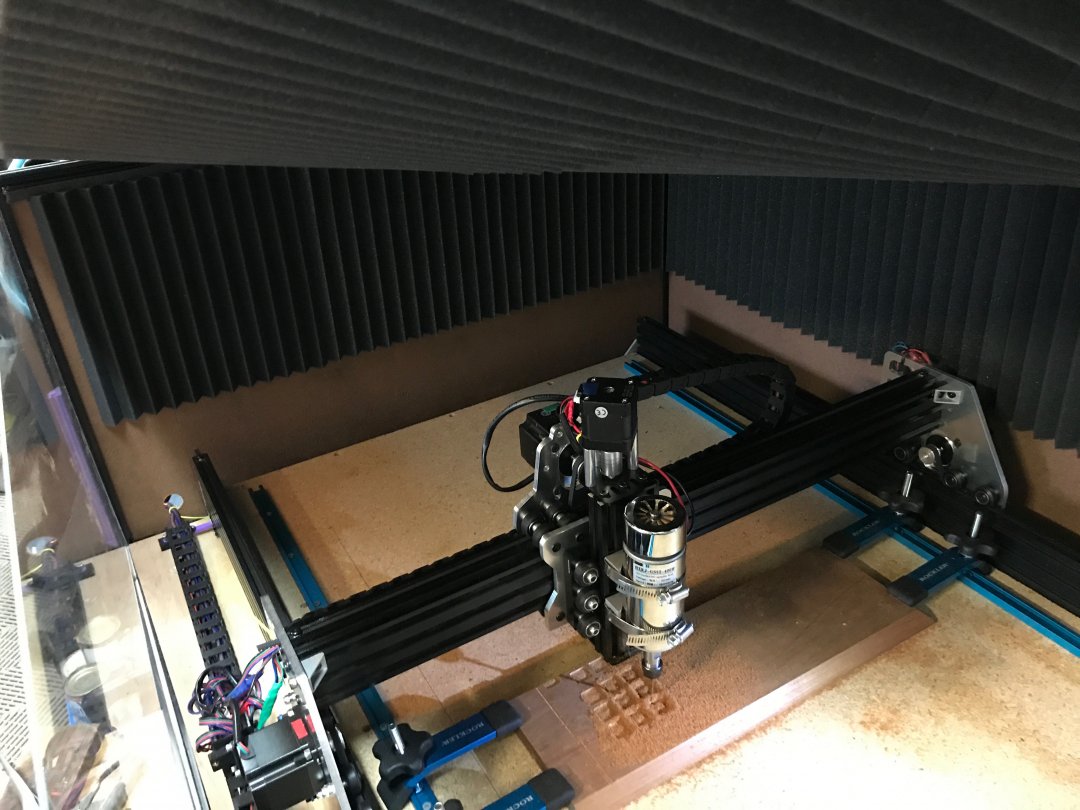
Here is another good view of the hold-down clamps. This is my first test and it worked!!!
This view shows it all closed up. I wasn't sure if the sound would be dampened enough so I 3D printed these purple slotted pieces that slide down into the V-slot tracks. You can see they have slots on either end. My plan is if I'm ever cutting anything that makes excessive noise, I can always slide another piece of wood or plexiglas in the purple slots to add another layer to dampen the sound.

This was a fun but challenging build since I knew nothing when I started. I have read in other places where it was assembled in a weekend. Well, off and on I spent at least 6 months on it.
OX CNC Build
Build in 'Cartesian Style CNC' published by Michael Forte, Jun 6, 2017.
OX CNC built using the kit from SMW3D with a Smoothieboard 5 and external motor drivers.
-
-
Build Author Michael Forte, Find all builds by Michael Forte
-
- Loading...
-
Build Details
- Build License:
-
- CC - Creative Commons Public Domain (CCO 1+)
Reason for this Build
I wanted to be able to machine custom parts for robotic builds and carve reliefs on wood.Inspired by
OX CNC
