
Update - 09-15-2015
The CubeSpawn Core:
frame and module design has been completely refactored to have less parts and be easier to build, I have not updated this site for a (long) while, but I will publish complete build instructions before the end of the year.
Super Busy building this full time!!
This affects
http://www.openbuilds.com/builds/cubespawn-3-axis-mill-module.758/
&
http://www.openbuilds.com/builds/cubespawn-ultimaker-3d-printer-module.2579
Latest Pix
https://picasaweb.google.com/103828779781480193226/DougsShopPhase2?noredirect=1
...
New Drawing - New 3D model

Sections of this document will fall into the following 6 categories
Introduction
Documents
Structural
Mechanical
Electrical/Electronic
Software
Introduction:
This printer is an implementation of the Ultimaker printer design, modified for automation,
The basic premise of the CubeSpawn builds is a goal of pure automation. Each cube is a frame with two bays:
The upper bay is a lightweight open Electronics/Electrical panel.
This is connected to the lower bay by a backplane.
The lower bay houses Mechanical/Robotics/Materials Handling equipment to give the cell its function.
This approach constrains the build area, but the design is intended to scale up by doubling, to a 1.2 meter cube, and beyond. For now, the 600mm size balances cost-to-prototype/capability i.e "big enough to make useful stuff, small enough to be affordable"
The Basic empty Cube consists of 5 electro/mechanical subsystems
Documents
- Cube Frame
- Electrical Tray & Rails
- Mechanical Tray & Rails
- Backplane
- Latches and connectors
BOM (Google-Spreadsheet) (updated 06/08/2014 10:25)
Structural
The frame is constructed of (12) 550mm pieces of 25mm tslot threaded M6 on both ends, I used 80/20 extrusion, but I understand Misumi costs somewhat less.
![[IMG]](proxy.php?image=http%3A%2F%2Fwww.openbuilds.com%2Fdata%2Fattachments%2F2%2F2770-1c684dbe1088ad908db77e8d23997e4d.jpg&hash=4b3edf45378d1e4fbda7d59125902df1)
(click to enlarge)
The (12) 550mm pieces are joined either with 25mm cube corners and 24 M6 bolts (I wasn't able to find any affordable 25mm cube corners, so I made some)
(click to enlarge)
However, if you do not have a mill, or access to one, you can use 24 brackets made from architectural 25x25mm aluminum angle, it does takes 48 bolts and 48 weld nuts to do it this way, but it can be useful to bootstrap a system and the hardware will recycle into subsequent builds.
![[IMG]](proxy.php?image=http%3A%2F%2Fwww.openbuilds.com%2Fdata%2Fattachments%2F2%2F2772-ce46399e9aa3611983c2d9b10ef289ec.jpg&hash=352b58c28314a37dc6f6213d400d8697)
(click to enlarge)
The Upper electrical/electronics tray's rails are fashioned from aluminum angle, bolted directly to the t-slot of the frame.
The Lower, mechanical tray's rails are 25x75mm extrusion, mounted on centerline on 3 sides of the cube
(click to enlarge)
The electrical tray carries either 1 or 2 aluminum panels (530x270mm) for mounted electric and digital devices. In the case of the Milling machine it will be 2, since the mill uses NEMA23 stepper motors, and therefore requires external motor drivers.
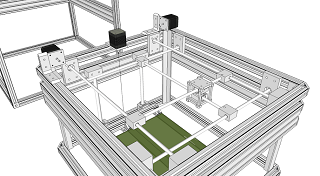
Mechanical
Due to the nature of the motion in this build, no linear motion components are used, beyond the 8mm linear bearings on the turned-ground-polished (TGP) shafting
3D models for the build will be located in Trimble's 3D Warehouse

The actual Build
Electrical/Electronic
Electrical distribution will be linear in these first machines, future plans are for a demand driven, managed, switched power network.
I'll be using one 48 volt, 10 amp power supply, for the motors and heaters.
This will power the motors and extruder, but also the SBC (Single Board Computer) , A Raspberry-Pi in this case, but a BeagleBone or other SBC would work as well.
There is also a 4 port ethernet hub on-board, this design used NEMA 17 motors so the smoothie should run them directly, end stops, lighting and any other accessories that may become available.

Rough layout for the electronics, still need to add a power supply, a DC-DC converter, ethernet to this setup
Software
All developed code will reside in CubeSpawn's Github. (I can use all the help I can get here!)
The on-board control stack is made for industry. An instance of Raspbian (debian for the R-Pi runs ROS (the Robot Operating System) which provides a vast spectrum of capabilities to the machine.
Additionally; MTConnect, an inter-cube messaging process integrated into ROS, runs on each cube. It provides a status based external interface to allow for semi autonomous machine to machine process coordination. the overall architecture and the underlying logic behind it is well explained in this video
Lastly, the ROS control architecture feeds g-code files to the SmoothieBoard.
Given the flexible nature of a Linux based SBC, I was able to get my system up and running without the ROS/MTConnect functionality for testing by installingOctoprint directly in Raspbian on the R-Pi and connecting it to the smoothie via USB.
A WiFi dongle in the R-Pi made the test rig portable. Octoprint's Smoothie aware, web-based printer interface made dropping a file and getting outputs a snap. this will be used to test the printers functions while the ROS control Stack comes together.
New Diagram
CubeSpawn Ultimaker 3D Printer Module
Build in 'Cartesian Style Bots' published by CubeSpawn, Sep 15, 2015.
This 3D printer is an implementation of the Ultimaker 3D printer Using the Modular approach, many of the parts from the CubeSpawn 3 axis mill translate straight across into this design, so adding new concepts should go quicker
-
-
Build Author CubeSpawn, Find all builds by CubeSpawn
-
- Loading...
-
Build Details
- Build License:
-
- CC - Attribution Share Alike - CC BY SA
Reason for this Build
The CubeSpawn array needs this resource
![[IMG]](proxy.php?image=http%3A%2F%2Fwww.openbuilds.com%2Fdata%2Fattachments%2F2%2F2775-cc8a0379e46610b673b719079a965de8.jpg&hash=336587c1045401021e2eefe0f78dca4d)
![[IMG]](proxy.php?image=http%3A%2F%2Fwww.openbuilds.com%2Fdata%2Fattachments%2F2%2F2774-527e2042a032aab33daa1a207ba93938.jpg&hash=5aaf01af37aaadeb515f5b83c4a025b4)
![[IMG]](proxy.php?image=http%3A%2F%2Fwww.openbuilds.com%2Fdata%2Fattachments%2F2%2F2828-8d6e4076e4f1f1e1a0976a014279f911.jpg&hash=a192c4d78e0e32fe4121c27679b82b6c)
![[IMG]](proxy.php?image=http%3A%2F%2Fwww.openbuilds.com%2Fdata%2Fattachments%2F2%2F2776-674f1fa0b8d374072877524e3bb42672.jpg&hash=192fbeb55ef9b31764e243ea4771bb0f)