
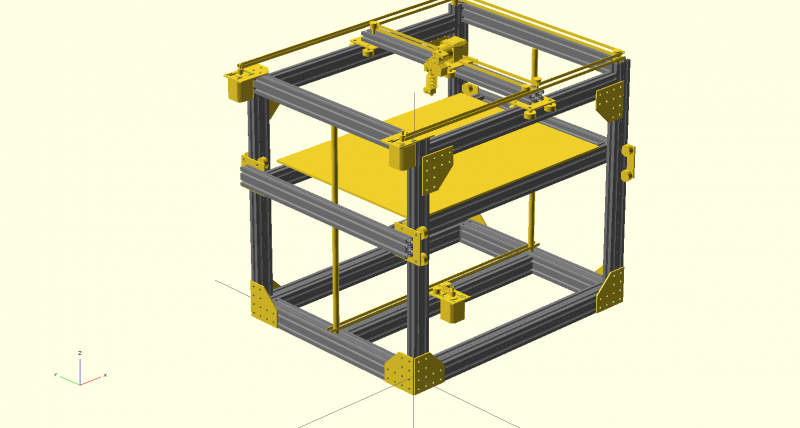
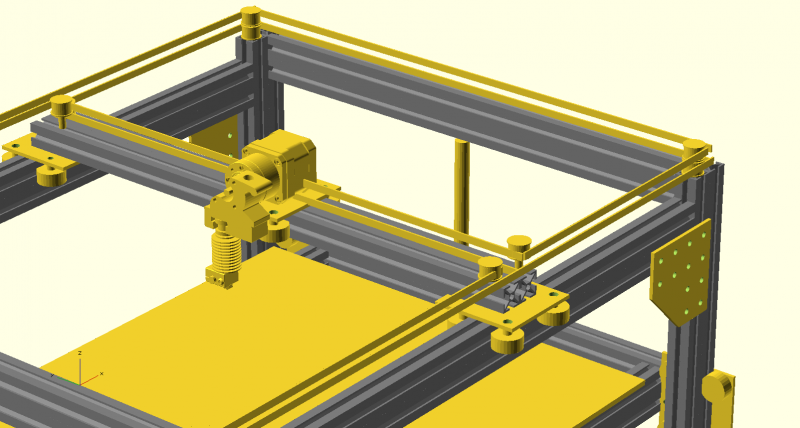
This CoreXY build is based on another build I have on thingiverse called Core-T where I attempted to use ordinary t-slot extrusion for my frame and linear motion. I had tried printed wheels in that project and they just didn't work the best. Now I've designed this V-slot version (hence Core-V) , since I've liked my experience with v-slot and v-wheels thus far. This is going to be a fairly large build volume, ~ 500mm^3. I've have incorporated some inspiration from the other H-bots on Openbuilds.
I've designed it in Openscad and have made it parametric so it can be scaled to the desired dimensions. Once I've finalized the design I will post the .scad files. For now just have some renderings. Hoping to to start building within the next couple of weeks.
key design goals:
1.) Most parts made from 1/8th aluminum plate; I want rigidity and I've found I can machine plates fairly well using inkjet printed drill templates.
2.) Full extrusion utilization; stacked idlers are screwed into tapped holes in v-slot and other idlers are bolted directly to v-slots
3.) Large, parametric volume
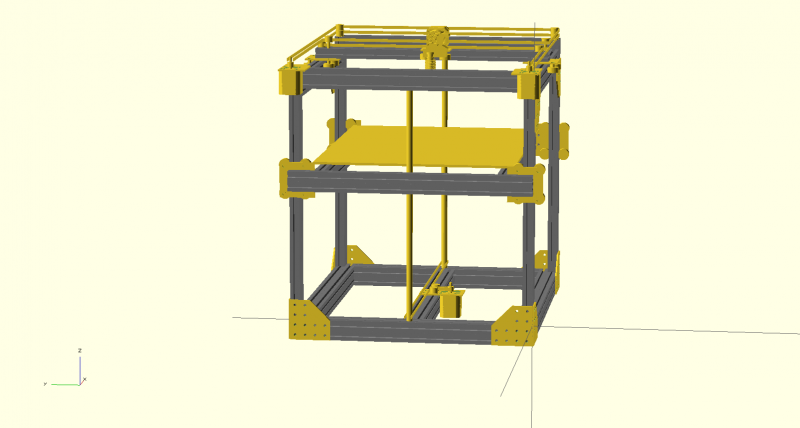
4.) Single motor drive for z-axis leadscrews

-
-
Build Author runninfarmer, Find all builds by runninfarmer
-
- Loading...
-
Build Details
- Build License:
-
- CC - Attribution Share Alike - CC BY SA
Inspired by
C-bot, H-bot