
If you are looking for a plotter with repeatable accuracy, this is not it. I was never able to get the accuracy I wanted with this machine but was a fun project to play with.This is my attempt at making a rolling plotter. I am just getting started with the design & think I have the Y-axis movement worked out. The wheels are currently 3D printed plastic 60mm diameter with an 88 tooth timing pulley along the center of the wheels. I used 60mm 3D Printed Wheel to get the starting point for the profile for these wheels. Each wheel is 3 printed parts, the main plastic wheel & 2 TPU plastic printed tires. I will use 2- 2020 V-slot for the X-axis starting with 500mm lengths & move to 1meter lengths after the bugs have been worked out. There shouldn't be much weight on the X-axis 2020's, so it seems like they would be sufficient. The drive belt for each side is a closed loop 444mm length GT2 belt. The only place I have found them so far is China site on ebay. I have 6mm height tension adjustment with the motor & can add some adjustment for the bottom center idler. I initially did not have that center idler in there, but thought the belt might rub on the ground. There is probably only .5mm-1mm clearance of the belt hitting the ground which is if it is tight should be enough. If not, I can make the TPU tires a little thicker. Looks like the other rolling bots listed on this site are using around 100mm wheels which I would guess gives better resolution. I could make them 100mm or any size that fits on my printer, but will start with 60mm for now. At 100mm diameter the tooth count would probably be around 152. I am not sure what the step settings will be for the Y-axis, but should be able to calibrate it with some trial & error.
4/7/2022 Update
Not much here. Just added a Parts List tab & added RollingPlotter_4287150.zip to files tab of all the parts from the thingiverse model in one file.
6/17/2020 Update
To avoid confusion, I deleted the older version of these design files from the Files tab & have them only on thingiverse at: Rolling Plotter with lots of Possibilities by GeoDave . I am also adding a spacer between the bearings in the wheels which should solve my wheel binding problem. Someone on V1Engineering site pointed out this solution to me. After I finish printing the newer version of the wheels, I will test it out again.
4/14/2020 Update
I uploaded the files to https://www.thingiverse.com/thing:4287150 today. I included the fusion 360 files, a sketchup file of the assembly, all the STL files, a build guide & BOM.
3/16/2020 Update
I attached a zip file to the files tab of the1st version of STL files & test file of BOM list for this build.
2/26/2020 Update
Think I have worked out all the design problems for this except for the servo connection to the pen movement. I had to lower the location of the wheels by 10mm because of the X-axis belt interference with the pulleys. 5mm might have been enough, but gave it a little extra for comfort zone. The X minimum limit switch I just placed in the design & will just make a simple mount for that for now. Looks like I will get around 35" of x-axis with 1 meter extrusions with current configuration. I switched the tires to use #327 O-rings instead of the 3d printed TPU. I am showing the model with 300mm length V-slot for better visibility of all the parts & have that as a variable length in the design in case I want to change it for viewing.
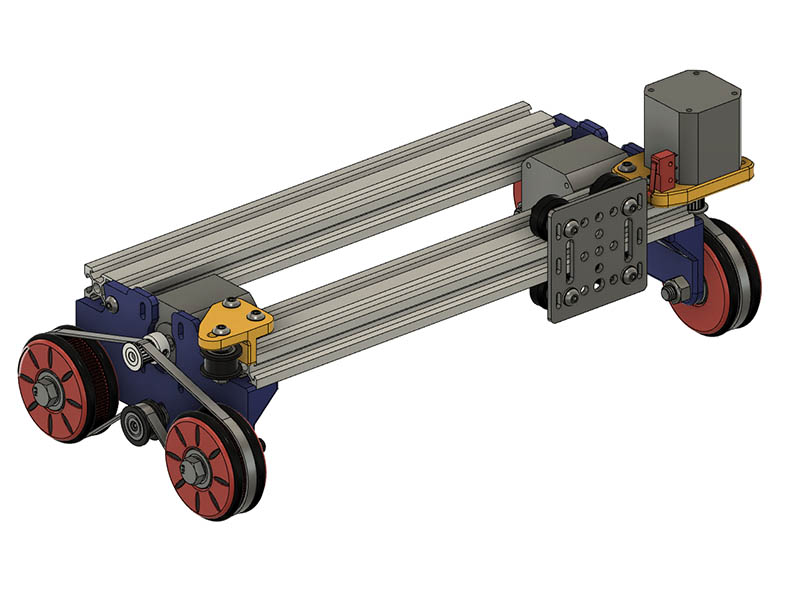
Here are some screen shots of the current design.




A Rolling Plotter
Build in 'Other Style DrawBot' published by David Bunch, May 10, 2024.
To build a simple plotter that rolls along the length of large paper, foam core or other flat objects.
-
-
Build Author David Bunch, Find all builds by David Bunch
-
- Loading...
-
Build Details
- Build License:
-
- CC - Attribution NonCommercial - Share Alike - CC BY NC SA
Reason for this Build
To plot large drawingsInspired by
-
Parts list
Qty Part Name Part Link Comments 2 V-Slot® 20x40 Linear Rail https://openbuildspartstore.com/v-slot-20x40-linear-rail/... Link whatever length, sizing for 500mm here 1 V-Slot® 20x20 Linear Rail https://openbuildspartstore.com/v-slot-20x20-linear-rail/... Link 250mm (125mm for Vertical Carriage) 1 V-Slot® 20x60 Linear Rail https://openbuildspartstore.com/v-slot-20x60-linear-rail/... Link 250mm Length to go between the 2 - V-Slot 20x40s 1 V-Slot® Gantry Plate - 20mm https://openbuildspartstore.com/v-slot-gantry-plate-20mm/... Link or print 6mmPlate_With_BeltClamp.stl 4 Solid V Wheel Kit https://openbuildspartstore.com/solid-v-wheel-kit/?ref=Pi... Link 2 Eccentric Spacer https://openbuildspartstore.com/eccentric-spacer/?ref=PiX... Link 1 Aluminum Spacers (10 Pack) https://openbuildspartstore.com/aluminum-spacers-10-pack/... Link 6mm Aluminum Spacers (only 2 currently needed currently) 1 Aluminum Spacers (10 Pack) https://openbuildspartstore.com/aluminum-spacers-10-pack/... Link 3mm Aluminum Spacers (only 1 spacer needed for Idler pulley) 1 Smooth Idler Pulley Wheel https://openbuildspartstore.com/smooth-idler-pulley-wheel... Link 2 Ball Bearing 625 2RS 5x16x5 https://openbuildspartstore.com/ball-bearing-625-2rs-5x16... Link 16 Precision Shim - 10x5x1mm https://openbuildspartstore.com/precision-shim-10x5x1mm/?... Link 3 Tee Nuts - M5 (10 Pack) https://openbuildspartstore.com/tee-nuts-m5-10-pack/?ref=... Link only 21 singles currently needed 32 Socket Button Head M5x12mm Screws https://www.boltdepot.com/Product-Details.aspx?product=6633 Link big discount for 100 pack 10 Socket Button Head M5x30mm Screws https://www.boltdepot.com/Product-Details.aspx?product=6637 Link 9 currently needed 12 M5 Lock Nuts https://www.boltdepot.com/Product-Details.aspx?product=4794 Link 9 currently needed 16 M5 Flat Washer Small Diameter https://www.boltdepot.com/Product-Details.aspx?product=4515 Link (5.3mm ID & 9mm OD)(13 needed) 20 M3x10mm screws https://www.boltdepot.com/Product-Details.aspx?product=6380 Link 16 needed or another 2 for the Z-axis optional servo mount 4 M3x12mm screws https://www.boltdepot.com/Product-Details.aspx?product=6381 Link 2 needed if using OpenBuilds Gantry Plate - 20mm 6 M3x16mm screws https://www.boltdepot.com/Product-Details.aspx?product=6382 Link 4 needed for Pi mount & I used another 1 for Z-axis mount 8 M3 Locknuts SS https://www.boltdepot.com/Product-Details.aspx?product=4792 Link 2 M4x10 screws SS https://www.boltdepot.com/Product-Details.aspx?product=6393 Link 1 M2.5x12mm screws (50 pack) https://www.aliexpress.com/item/1005001975621423.html Link (Optional mechanical limit switches) 1 M2.5 locknuts (50 pack) https://www.aliexpress.com/item/32985781753.html Link (Optional mechanical limit switches) 1 F695zz Mini Flanged Ball Bearings (10 pack) https://www.ebay.com/itm/10-x-F695zz-Mini-Metal-Double-Sh... Link Only 8 bearings needed, so you have 2 spares 1 GT2 6mm Belt (2 meters) https://www.aliexpress.com/item/32619587350.html Link if using 1000mm 2040 you will need a little more than 2 Meters 16 Bearings 608-2RS https://shop.v1engineering.com/products/bearings-608-2rs Link 1 5" cable ties (25) https://shop.v1engineering.com/products/25x-5-cable-ties Link You should also be able to find these local 1 12v Power Supply https://shop.v1engineering.com/collections/parts/products... Link See what your controller board requires before purchasing this 1 #328 Very Hard Buna N O-Ring (10 pack) https://www.grainger.com/product/FABORY-Round-328-Very-Ha... Link For metric O-Rings probably can use 4.5CSx47IDx56OD or 5.0CSx47IDx57OD but not tested 1 Nema17 (3 motors) https://www.amazon.com/dp/B07QV1ZVJR/ Link I like the plugin type cable motors 1 GT2 Timing Pulley 20T (Pack of 5) https://www.amazon.com/gp/product/B077GNZK3J/ Link 20T I am using for wider Belt path than 16T 2 444mm Length GT2 6mm With Closed Loop timing belt https://www.aliexpress.com/item/4000307087297.html Link I bought 8 for spares 1 Controller board of your choice Link I am using an MKS Gen 1.4, but this is no longer available 1 MG90S Servo Metal gears (Pack of 2) https://www.aliexpress.com/item/32975209678.html Link Only 1 servo needed 1 1 Meter Servo motor extension https://www.aliexpress.com/item/33016965243.html Link 4 M8x1.25x50mm Hex Bolt https://www.boltdepot.com/Product-Details.aspx?product=15845 Link Partial Threading should work better than full threads (can also use 5/16" instead) 4 M8x1.25 Locknuts https://www.boltdepot.com/Product-Details.aspx?product=4806 Link (Can also use 5/16" instead) 16 M8 Flat Washer https://www.boltdepot.com/Product-Details.aspx?product=4529 Link (Can also use 5/16" instead) 0 Link This BOM might need to be adjusted some depending on how you build it. -
Attached Files: