
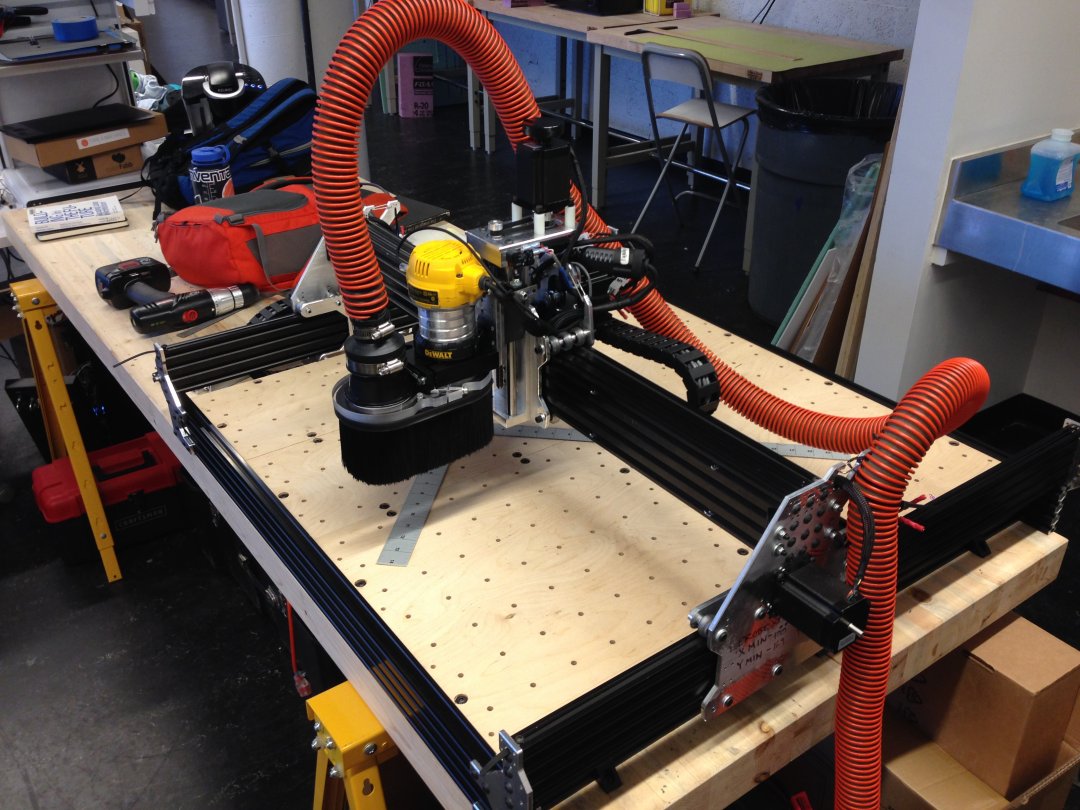
About My Machine (I guess it doesn’t really have a name yet):
This project started as a simple size upgrade to my Shapeoko 2. One thing led to another and soon the project ballooned into rebuilding the entire machine stem to stern and redesigning everything, electronics and all. At this point I am fairly certain I could have bought a machine more capable than this one for the same cost of what I put into it, but it’s been an incredible learning process, and frankly it’s just too much fun building it all yourself – The journey has been worth it all! So without further Adieu…
BUILD WRITE-UP UPDATE IN PROGRESS! PART FILES AND MODELS ARE ON THEIR WAY
Overview:
Approximate Build Volume: 32”x 25”y 4”z
Steppers: Nema 23 282 Oz.
High-Torque Stepper Motor, Stepper Motor, Driver, Stepper Motor kit, DC Servo Motor, DC Servo Motor kit, Stepper Motor Power Supply, CNC Router, Spindle, and other Components. Stepper Motor | Stepper Motor Driver | CNC Router | Laser Machine | 3D Printers For Sale
Control Electronics: Dynomotion KSTEP/KFLOP Dynomotion Motion Control Boards for CNC Manufacturing and Robotics Applications
Router: DeWalt DWP 611 w/ Super PID closed-loop RPM Controller: www.SuperPID.com - Super-PID Closed-loop Router Speed Controller
Collet: Precise Bits Precision Collet set Precision Dewalt 611 Collet Kits
Dust Shoe: Kent CNC MINI Split-Shoe MINI Split-Shoe (AMAZING piece of gear! get one!)
I have my machine dialed in with its rapid speed at 500 inches/minute and it runs awesome. There is a bit more performance I could get however, I found that beyond about 600 inches/minute the belt (the weakest part of the whole shindig) starts slipping. Also the moving mass starts rocking the table the machine sits on all over the place. I am looking into new beefier belting and also some mounting options.
All the plates are cut from ¼” 6061 Aluminum and since I was going the way of redesigning and cutting all these myself, I took the opportunity to beef up some of the existing designs, particularly Mark Carew's original OX design as well as ooznest’s revisions, and added some neat features that I am really stoked to share with the community.





General Design Logic:
Overall I broke the machine down into three components and designed each independently as it’s own system.
1. Mechanical
2. Electrical
3. Wiring/Cabling Harness
This strategy breaks the total package down into discreet parts, which allows the machine to be taken apart, moved, and set up very easily. It also facilitates very convenient maintenance and upgrades. With my old machine, everything was all one big system; every component was hard-wired and fixed. This made moving a real hassle, and upgrading/maintenance an absolute nightmare.
This strategy has paid enormous dividends already in ease of construction and development. Everything on this machine has been installed and taken off at least three or four times during development, and each time with no headaches or hassle. More on this later.
Initial Operation Runs (still a bit rough but the lights are finally on!)
The Plates:



As I mentioned earlier, the plates are cut from ¼” 6061 Aluminum, and are a mashup of a couple of different designs in circulation in the community. A great amount of effort was invested in the details of these so I will do my best to enumerate it all.
-taller to give 4” of Z travel.
-wider to allow greater wheel base
-deeper side notches to provide clearance for brackets
-added carabiner wire gate cable management
I was thinking about wire-gate carabiners, and how they get their spring tension by the hole spacing alone... so why couldn't this be incorporated into a cnc plate design? As it turns out, really cheap wire carabiner keychains are available at Lowes, so I grabbed some of those, took the wire gates off of them, did some mockups to get the hole spacing just right, and voila! Cable management that is secure yet temporary. As I said earlier, the machine was developed as three components, the cabling harness being one of them. This feature allows the wiring to be installed easily and be tucked away all snug as a bug, but also be able to be stripped out just as easily and without having to cut anything at all.





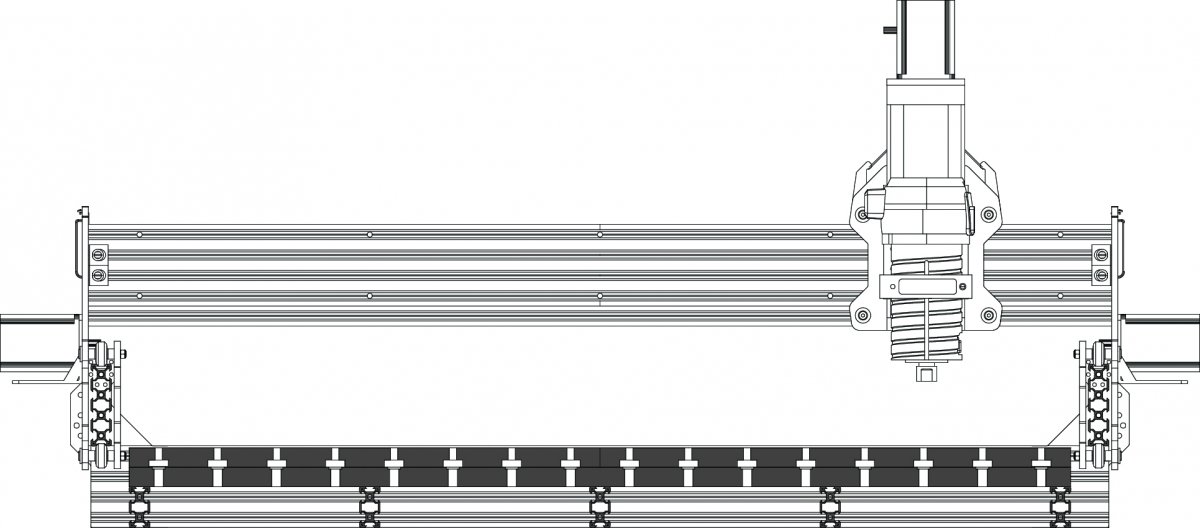
The Gantry:
I changed the gantry to be three 20x80 v-slot extrusions sandwiched together with ten, low profile M5 screws. I also re-positioned the 20x40 extrusion behind it a bit to improve the clearance in order to achieve the 4” Z travel I was shooting for. Re-orienting it sideways also allows it to carry the cable chain very conveniently.
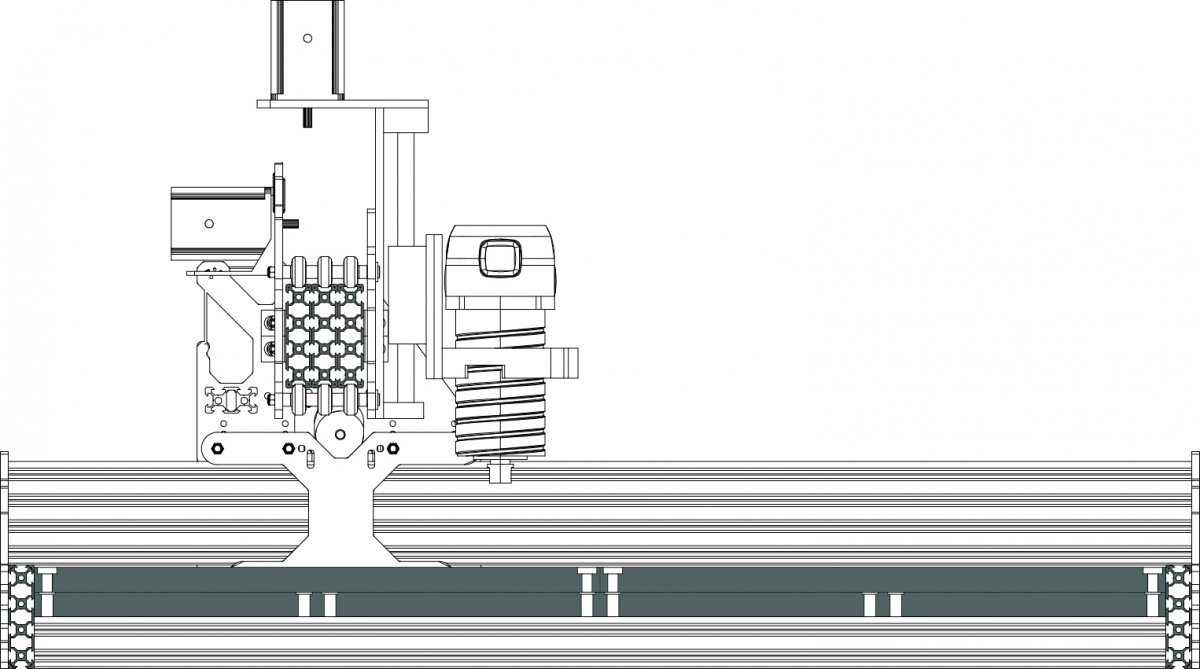
The Z-Axis
I did away with the standard Z axis and instead ordered a Z axis assembly on ebay. I had nothing but problems with Z axis rigidity on my Shapeoko 2, so I sprung for a heavier option and I couldn't be happier that I did. The one I got is awesome, SUPER rigid, and very simple...great vendor too. This is a link for something very similar to what I got from the same vendor, I don't think mine is available anymore, but this one is basically the same thing. I highly recommend it if you are thinking of an upgrade that has massive bang-for-the-buck.
Z Axis CNC 4.75" ++ Fast-Travel ++ ANTI-BACKLASH ++ Linear Slide Router Actuator
I also Created a belt-drive system that has a 2:1 gear reduction, similar to the one made by Improbable Construct for the Shapeoko 2. I do a lot of 3D toolpaths, which means that the speed of the Z axis usually becomes the limiting factor overall, this rectifies that problem. Because this essentially halves the available torque while doubling the rpm's, the bigger steppers really come in handy here. All told the Z-axis is now solid as a rock, smooth as silk, and runs like a banshee.
NOTE TO ANYONE USING MY PLATE DESIGNS: The Z-axis mounting holes in the gantry carriage plates were located as they are in order to mount the particular Z-Axis that I bought. These mounting holes will probably not directly work for the Z Axis setup you are using without some tweaking!
Also… The Z-Axis offset motor mount plate in my design again was created specifically for my Z-Axis kit. If you want to use it, be sure to check that the mounting hole spacing will work on your hardware. Verify! Verify! Verify!
The Bed
![Bed Exploded Axon [Converted].jpg](https://openbuilds.com/attachments/bed-exploded-axon-converted-jpg.14345/)
The bed is a bit of a prototype that I am still thinking about iterating again. I may change it later but it has been good so far. It consists of two layers of 3/4 Baltic Birch Plywood, MDF would have worked too but this was what I had on hand.
The first layer is the fixture board, which allows materials to be fastened to the bed in four different ways: Screw down, Screw up, Double Sided Tape, and Bolted hold-down clamps. The overall layer has been broken down into smaller pieces so that the machine can cut it's own replacement fixture boards. It also means if you are cutting a small part, you can use a small fixture board and position it wherever you want for convenience. The only drawback I have found so far with this setup is leveling the different boards out, but that's a work in progress.
The lower layer is the substrate board which has threaded inserts in two grid patterns for specific purposes: Mount the second-layer spoil boards and Mount material via bolt hold-downs. Also there is a grid of holes for positioning pins so the second layer Fixture boards can be indexed into the same position repeatedly. This way you can use a smaller fixture board and drop it anywhere you want with the same fastening options. One thing I have been wanting to do is establish the fixture offset settings for each of the pinned positioning options but that is down the road I think.
The moral of the story here is that for me, the bed and material hold down system creates a huge part of the user experience of running the machine. For this reason I designed the bed to have a system of mounting options. Like I said, it's a work in progress... I'm still evaluating but it's good thus far.







The End Stops
Originally I designed the end plates to allow for a double Y-Axis rail if an upgrade was needed. Really I think this might be overkill so the little wings I created became great mounting positions for end stops to close my limit switches. While learning how to program tool paths I wound up crashing my gantry into the limits a lot and so I rigged up this little guy with a spring and some spare hardware. Basically it allows the limit switch to be tripped, and if the gantry has excess momentum and it crashes into it, the spring takes out the slack so it still comes to a soft stop. The depth and spring tension can be adjusted with a couple of wrenches no biggie. It is an elegant solution that has proven really reliable.
The Cable Harness
For the cable harness It needed to be a tightly packaged unit that could be installed and removed easily. In order to accomplish this, every wire was terminated with Molex connectors, each marked to their respective mates on the machine or the electronics enclosure. It makes re-installation an idiot proof affair. I have saved untold amounts of time and hassle by being able to strip out all the wiring easily and quickly and put it right back with the same ease, no cutting.





The Electronics Enclosure
I gutted a PC chassis and used it as my enclosure for all the electronic goodies, there came to be a lot of them actually. I originally used a TinyG board to control my steppers but upgraded to the Dynomotion KFLOP with a KSTEP driver board. I absolutely cannot speak highly enough about these products. They are industrial grade with immense customization features and expansion capability (you could run 8 axes if you wanted). The price is a bit steep up front however, It is absolutely worth it. Also the software (which is really similar to Mach 3) used to interface with the boards is available for free which is awesome and the online support is terrific too, the guy who designed them usually answers questions. Like I said, can't recommend high enough.... end of rant.
I have a Dewalt 611 router hooked up with a SuperPID closed loop controller, which is in turn controlled through the KFLOP board. This gives full rpm control through gcode.







The First Big Project:
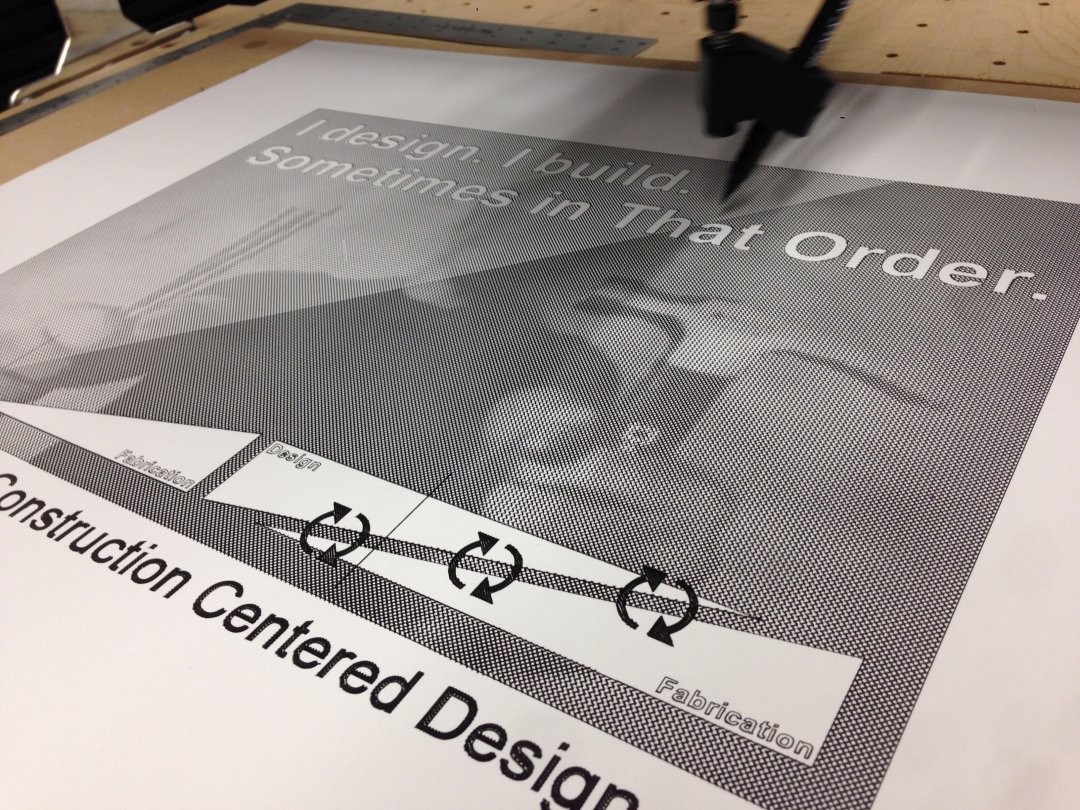
Interestingly, the machine didn't really reach a well dialed in state until I had the need for it to be so. This project really brought everything together and to completion. I really see this first project as a key part of the machine build... it really tied everything off and got it dialed in and tuned. I have learned through this process that the necessity of something is such a huge motivator for its creation. Once I had a project I wanted to do, and a deadline to do it… getting my machine ready to rock and roll was a real thing, and I powered through a ton of troubleshooting bugs and issues I would have otherwise left alone had I not the immediate need for them to be resolved.
This machine was finished right about the same time I was finishing up my thesis for my master of architecture so I used it to draw all my final presentation boards as well as to cut out some mockup pieces I had designed in my project. It was a solid three weeks of work to get everything dialed in and sorted out just right, and to figure out exactly how I wanted to work the tool path strategies.
I used the pen holder from Rockcliff Machine, and used a fine brush tipped felt pen. This way I could manipulate the z depth in order to get varying line weights from variable pressure on the pen. In the end the difference between heavy line weights and hair fine line weights was about six thousandths of an inch. The problem with this was that the bed had to be milled flat and parallel to the XY plane of motion to an accuracy of a one or two thousandths over 24." It was a great exercise in precision machining, because if something wasn't right, the image didn't come out right.






Conclusion
I think this is the lay of the land as far as major developments or revisions I have added. I would be remiss if I didn't give credit to the awesome work done by Mark Carew in designing this machine, as well as ooznest for his great updates as well. Huge shout out and thanks for the awesome machine design and community! I hope my contributions can be added to the pool and make everyone else's CNC just a bit more awesome!
I am still in the process of uploading all the content for this build and finishing the images and write-ups, lots more to come, so stay tuned!

Beefed-up and customized OX build
Build in 'X/Y Table Style CNC Mill' published by semperfikurt, Sep 13, 2016.
My Machine is based on the OX CNC designed by Mark Carew as well as the ooznest kit, and it incorporates a bunch of my own details and revisions to increase performance and robustness. It has become way more beastly than I originally planned!
-
-
Build Author semperfikurt, Find all builds by semperfikurt
-
- Loading...
-
Build Details
- Build License:
-
- CC - Attribution Share Alike - CC BY SA
Reason for this Build
I built this as part of my research for my master of architecture thesis which has to do with fabrication methods driving design.Inspired by
Mark Carew's OX CNC Machine, ooznest CNC, Openbuilds Community, Shapeoko 2 -
Attached Files:


